



















5 Key Underwater Positioning Systems Every Engineer Should Know
Learn how an underwater positioning system works, from acoustic methods such as USBL, DVL and sensor fusion. Find out which system fits your depth, accuracy, and ROV needs.
5 key underwater positioning systems every engineer should know
What is an underwater positioning system?
GPS works on land using satellite radio signals. Underwater, radio waves cannot penetrate water and the signal is lost within centimetres of the surface. An underwater positioning system uses acoustic signals to determine the real-time location of ROVs, AUVs, divers, or fixed subsea assets.
These systems are used across offshore oil and gas, dam and infrastructure inspection, port security, defense, and marine research.
Why GPS fails underwater
GPS uses high-frequency radio waves. Water absorbs those waves almost immediately. At even a few centimetres of depth, the signal is gone. Saltwater makes this worse because higher salinity accelerates signal attenuation.
This is not a technology limitation that better antennas can solve. It is physics. That is why underwater navigation systems exist. They use sound instead of radio, because sound travels efficiently through water where radio cannot.
How underwater positioning systems work
An underwater positioning system operates by transmitting an acoustic pulse from a transducer through the water. The signal travels to a transponder or responder mounted on the ROV. The system measures the two-way travel time of the acoustic signal and, using the known speed of sound in the water, calculates the distance between the reference point and the target.
One distance measurement gives you a sphere of possible locations. Two narrows it to a circle. Three gives a single point in 2D. For accurate 3D positioning, four reference points are used. This method is called trilateration.
Types of underwater positioning systems
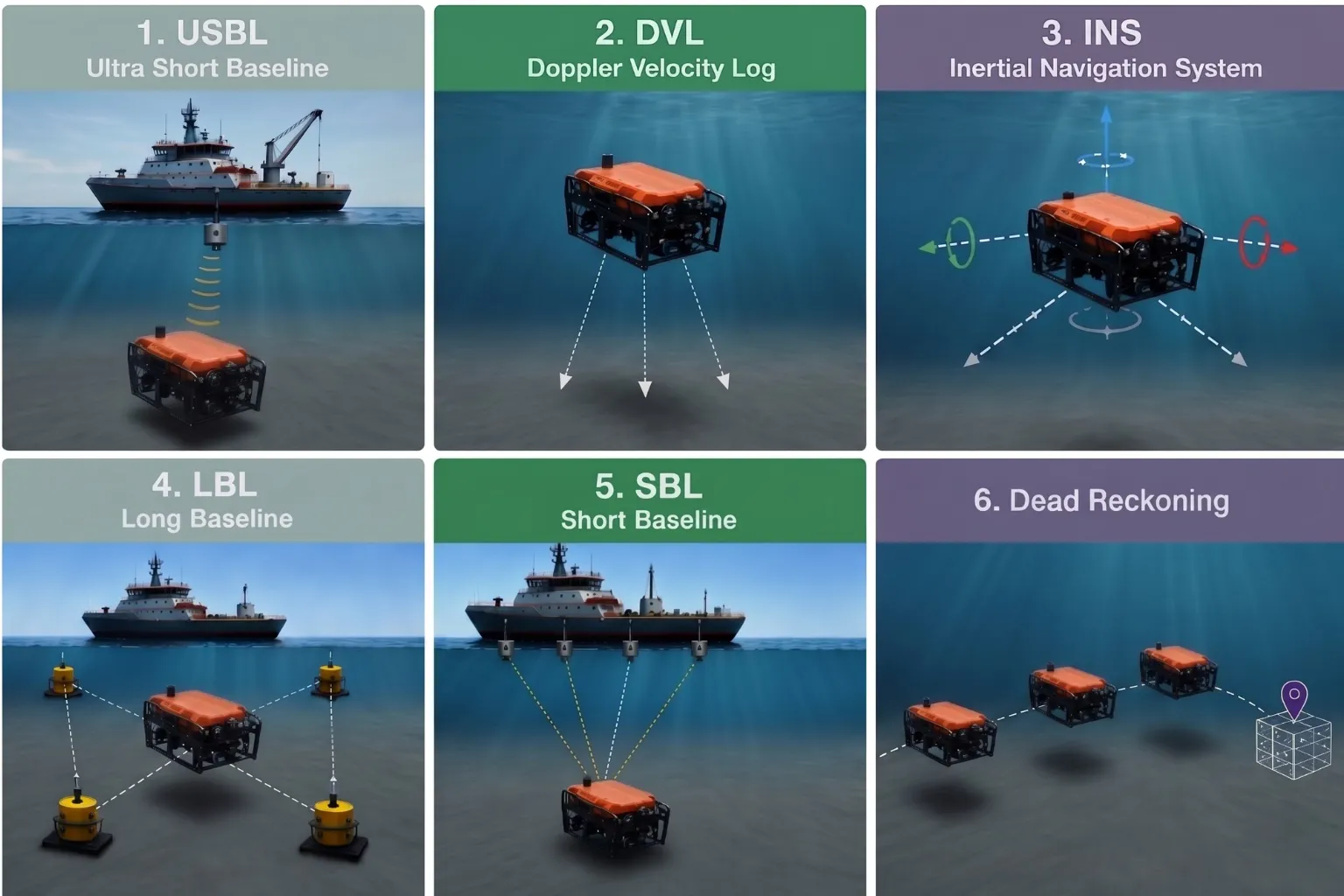
USBL (ultra-short baseline) — live location tracking
The USBL system has a top unit (transducer) and a bottom unit (transponder). The transponder is mounted on the ROV. The transducer is mounted beneath the ship. A DGPS/GNSS antenna is installed on the vessel to provide accurate surface positioning.
During operation, the transducer transmits acoustic signals to the subsea transponder. The transponder responds, and the system measures the two-way travel time. Using this range data, the measured arrival angle, and the vessel’s GPS position, the USBL system calculates the target’s exact real-world coordinates in real time.
USBL is the preferred solution for real-time tracking in open water environments where GPS-referenced positioning is available.
DVL (Doppler velocity log) — confined space navigation
DVL is a precision navigation sensor used for underwater operations where conventional surface-referenced positioning systems such as GPS or USBL are unavailable or impractical. Unlike GPS-referenced systems, a DVL does not provide an absolute geographic position. Instead, it measures the ROV’s velocity and direction relative to the seabed or surrounding water column using the Doppler shift of acoustic beams transmitted towards the bottom. These continuous velocity measurements are integrated over time through dead reckoning to estimate the vehicle’s travel path, relative position, and motion profile.
DVL also supports advanced control functions. Station keeping maintains the ROV at a fixed position. Auto hold keeps a constant standoff distance from a structure or target. Low-speed precision manoeuvring is used for inspection and intervention tasks where fine control matters.
DVL systems are particularly useful in confined environments where GPS reference is not possible, such as pipelines, tunnels, and search and rescue operations.
Example: When inspecting a buried pipeline or tunnel for cracks, DVL tracks every move the ROV makes. The exact position of any defect found can be marked and handed to repair teams with a verifiable coordinate.
INS (inertial navigation system) — heading and orientation
INS tracks the direction the vehicle is facing and moving using onboard accelerometers and gyroscopes. No external signals are needed. It drifts over time without correction, so it is almost always paired with DVL or acoustic fixes to stay accurate.
LBL and SBL (long baseline and short baseline)
LBL uses multiple transponders placed on the seabed at known positions. It delivers the highest acoustic accuracy, at decimetre to centimetre level. It is best suited for deep water and precision surveys where the infrastructure cost is justified.
SBL fixes transducers to the vessel hull. No seabed setup is required. Accuracy is moderate, sitting between USBL and LBL. It works well for mid-range operations with simpler logistics.
Dead reckoning
Dead reckoning estimates the current position from a last known location using heading, speed, and elapsed time. It requires no external references. The limitation is that errors in heading or speed compound quickly over distance, making it unreliable for anything beyond short gaps. In modern subsea navigation systems, dead reckoning is used only as a short-duration fallback when other systems briefly lose contact.
Key challenges in underwater positioning
Acoustic multipath is one of the most common problems. Sound reflects off the seabed, vessel hulls, and structures, creating false range readings. This is worst in shallow water and confined spaces like dams and tunnels.
Sound velocity variation matters too. The speed of sound changes with temperature, salinity, and depth. Without a calibrated local sound velocity profile, distance calculations will be wrong.
There is always an accuracy-versus-cost trade-off. LBL delivers the highest accuracy but needs seabed infrastructure. USBL is faster and cheaper but less precise.
Bandwidth is limited. Acoustic communication is slow compared to radio. High update rates reduce range, so long-range operations must accept less frequent position fixes.
Always test system performance in the actual deployment environment. Sound velocity, noise levels, and multipath conditions vary significantly by site.
Improving accuracy with sensor fusion
INS operates continuously and provides position between updates. DVL feeds it accurate velocity, slowing drift. Periodic USBL or LBL fixes correct accumulated INS errors. A Kalman filter processes all inputs together and outputs the best possible position estimate at every moment.
The result is continuous, accurate positioning even when one sensor is temporarily degraded. For inspection operations, this means every data point the ROV captures can be assigned a reliable coordinate. That is what turns inspection footage into usable engineering data.
Applications of underwater positioning systems
Offshore and pipeline inspections
Every defect, whether corrosion, damage, or coating failure, is logged at a specific coordinate. Maintenance teams return to the exact location without re-surveying the asset.
Ship hull and port security
Hull inspection ROVs use positioning to verify complete coverage and to log defect locations for repair and classification. In port security, an underwater tracking device allows continuous monitoring of vessel undersides and harbour infrastructure at recorded coordinates.
Dam, tunnel, and confined infrastructure
Multipath is severe and surface GPS is inaccessible. DVL combined with INS maintains accuracy entirely from onboard sensors, without depending on acoustic infrastructure that the environment cannot reliably support.
Search, recovery, and marine research
Search operations need systematic coverage with no gaps. Recovery needs the precise location of a found object. Scientific data is only useful if it can be spatially referenced. In all three cases, georeferenced ROV tracking throughout the mission is what makes the output actionable.
EyeROV in practice
EyeROV deploys DVL and USBL based on the mission objectives, site constraints and environmental conditions, selecting the most effective navigation solution for each operation. In dam inspections, where external acoustic references are unreliable and surface GPS is not an option, DVL maintains accurate positioning entirely from onboard sensors. In the leakage pipeline or tunnel, DVL tracked the ROV’s exact route, logging leakage sources at precise positions and turning detections into actionable findings. In the Antarctic project, both USBL and DVL were deployed together, USBL providing GPS-referenced position from the surface vessel while DVL sustained navigation continuity beneath the ice.
Choosing the right underwater positioning system
| Factor | What to consider |
|---|---|
| Depth | USBL for shallower operations. LBL for deep precision work. |
| Accuracy | LBL + INS + DVL for highest precision. USBL + DVL for navigation grade. |
| Environment | DVL + INS for confined spaces. USBL or LBL for open water. |
| GPS access | USBL if surface GPS is available. DVL + INS if not. |
| Deployment speed | USBL or SBL for fast turnaround. LBL for permanent arrays. |
Define your accuracy requirement first. The most common mistake is choosing a cheaper system upfront and discovering it does not meet the job’s needs, resulting in a second mobilisation that costs more than the right system would have.
The role of positioning in ROV-based inspections
Video without coordinates is footage. Video with coordinates is an inspection record. Position data logged against every finding supports asset management, maintenance planning, and regulatory reporting. It makes every inspection repeatable and comparable over time.
EyeROV’s inspection platforms integrate positioning based on mission requirements. Across dam inspections, pipeline surveys, and Antarctic operations, every finding is spatially tagged, making the output usable in engineering workflows without additional survey effort.
Future of underwater positioning technology
AI-assisted signal processing is reducing multipath errors and improving acoustic reliability in challenging environments. Real-time 3D mapping is combining positioning data with sonar to produce live structural models during inspection, which cuts post-processing time. Autonomous inspection is becoming commercially viable as AUVs run full survey missions with minimal operator input and produce georeferenced outputs.
The right underwater positioning system depends on your depth, environment, and whether GPS can be deployed on the surface. USBL for open water live tracking. DVL for confined spaces where GPS is not an option. Fuse both with INS for the most accurate, continuous result. Get it right and every data point has a verified location. Get it wrong and you have footage, not findings.
If you are evaluating underwater positioning or navigation systems for an upcoming operation, talk to the EyeROV team. We can help you determine which configuration fits your site and mission requirements.
To learn more about how remotely operated vehicles work, read our guide: What is ROV? Meaning, Types and How It Works Underwater.
Frequently asked questions
How do you track location underwater without GPS?
USBL uses acoustic signals between a ship-mounted transducer and an ROV transponder, combined with the vessel’s GPS, to give real-time position. Where GPS cannot be deployed, DVL + INS tracks movement and direction from a last known point.
What is USBL and how does it work?
A transducer beneath the ship sends acoustic signals to a transponder on the ROV. The round-trip time gives the distance. The ship’s GPS uses that distance and the signal angle to calculate the ROV’s exact real-world location in real time.
Which underwater positioning system is most accurate?
LBL + INS + DVL fused together. LBL gives precise absolute fixes. INS and DVL maintain continuous drift-corrected tracking between fixes.
What is the difference between LBL and SBL?
LBL uses seabed-mounted transponders for high accuracy but needs infrastructure. SBL uses hull-mounted transducers for simpler setup with no seabed equipment, but delivers lower accuracy.
Can ROVs navigate autonomously underwater?
Yes. Modern AUVs use DVL, INS, and AI navigation to run structured survey missions with minimal operator input. Commercial autonomous inspection with georeferenced outputs is already deployed in pipeline and offshore work.
Read more about EyeROV’s Underwater Inspection Services.